Disturbance signals in a feedback control system
disturbance signal : unwanted input signal
-> output에 영향을 주는, 내가 원하지 않는 input 신호

각속도 w로 회전하는 2개의 wheel이 있다. 회전하는 그 사이에 Steel bar를 통과시킨다.
그러면 철판 두께에 얇아져서 원하는 두께 형태로 생산된다.
이 때 철의 품질에 영향을 주는 것이 속도. 일정한 속도가 굉장히 중요하다.
** 전압을 가해주면, 속도가 나오는 형태.
여기서의 disturbance : 철판이 wheel 사이에 들어가면 속도가 떨어진다. 이러한 상황들을 나타냄.
open-loop system, steady state error

위의 open-loop system의 steay state error를 구해보면 아래와 같다.
이 steady state error의 식들은 모두 motor 내부에 있는 parameter 값들이라 우리가 쉽게 건드릴 수 없다.
** Km : 모터 내부 함수, 전류에서 증폭하는 gain
** D : 입력의 크기, disturbance가 들어오는 크기
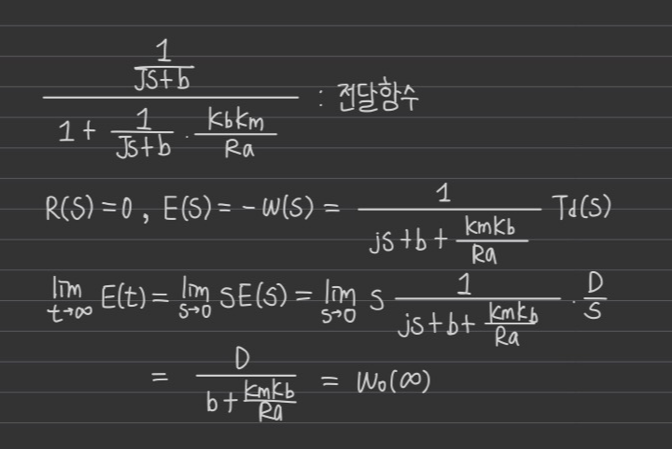
closed-loop system, steady state error

closed loop를 깔끔하게 정리하여 signal flow로 나타낸 모습은 아래와 같다.



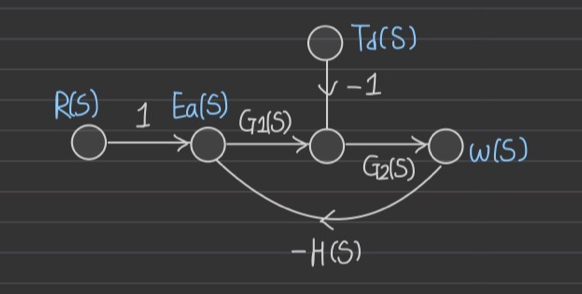
** Tachometer : 모터의 회전속도를 측정하는 측정장치
** Ka : 제어기에 해당


** 회전하면 그에 해당하는 속도가 발생한다.
-> 외부에서 방해를 하면, 속도가 0인 순간 최대 torque가 발생한다.
The ratio of closed-loop to open-loop steady-state space due to an undesired disturbance is..


** 입력에 들어가는게 disturbance, 출력에 들어가는 게 noise
noise
closed-loop control system with measurement noise
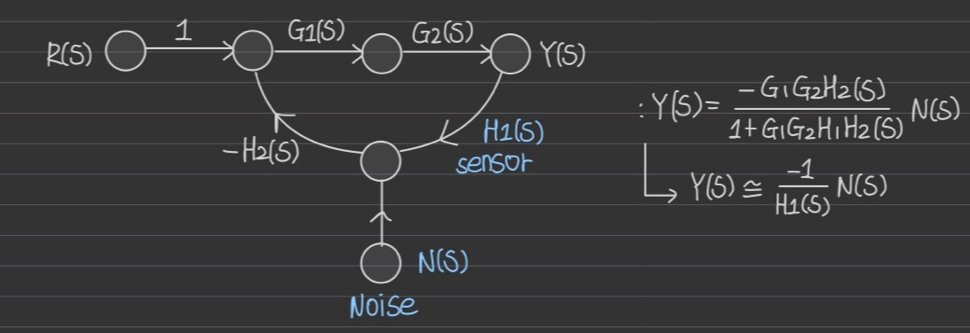
그림을 보면 센서(H1(s))에 따라서 noise가 출력의 영향을 받는다는 것을 알 수 있다.
closed-loop control system with output noise

output에 noise가 들어가는 형태이다.
seinsitivity func과 형태가 같다. output noise는 sensitivity와 같이 전달함수도 이해하면 된다.
Control of the transient response of control systems
transient response : the response of a system as a function of time
-> 과도 응답.
motor
Amplifier: 전압을 증폭
Tacometer : 속도를 측정
Gain [Ka]에 따라서 응답 특성(=transient response)이 조금씩 달라진다.
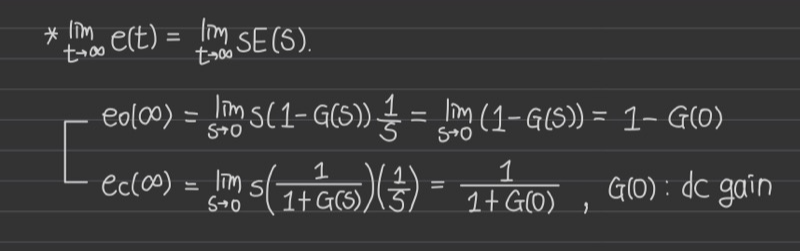
steady-state error
응답 특성 중에 steady state error를 살펴보자.
steady-state error : the error after the transient response has decayed, leaving only the continuous response
아래 그림은 no feedback인 경우, feedback인 경우의 steady-state error 유도 과정이다.

steady-state error for a unit step input
steady-state error 예제

The cost of feedback
센서 이용, 컴퓨터 이용 등으로 조금 더 complexibity하다.
그러나 효율적, 유용하게 사용할 수 있다.
desing example
Mars rover vehicle(화성 탐사 로봇)의 goal
-> gain K의 변화에 대해서 los sensitivity를 가지는 것
-> disturbance(바위 덩어리)에 대한 영향을 완화시켜라.
예제(The rover with low sensitivity to changes in the gain K)
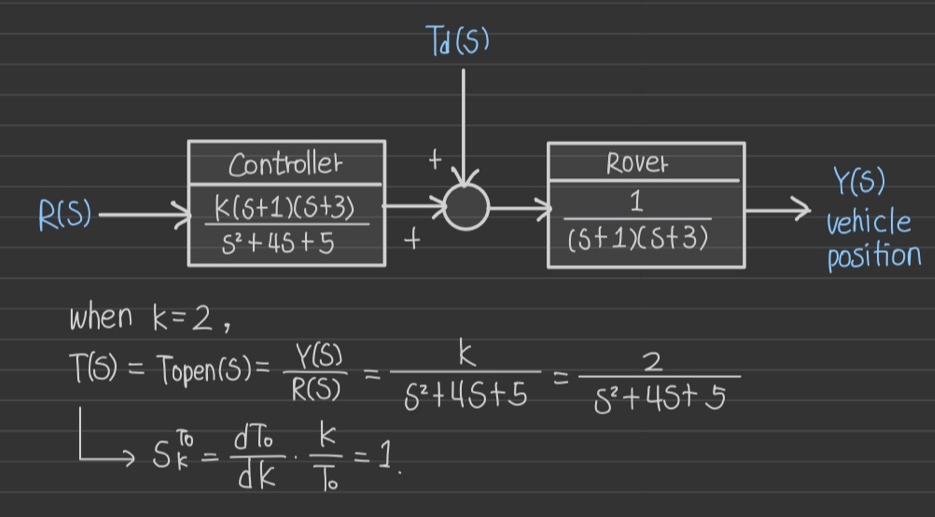
제어기가 (s + 1)(s + 3)을 소거시키고 싶어한다.
-> open loop를 통해서도 조절이 가능하다.

위의 그림은 원래의 시스템은 그대로 두고 feedback을 사용해서 gain K만 조정하는 것이다.
전달함수는 같으나, sensitivity 식이 다르게 나옴을 알 수 있다.
또한 feedback system의 경우, 속도 = 0.6에서 sensitivity가 적게 받음을 알 수 있다.
예제(The rover with modest effects from disturbance such as rocks)


gain K = 50으로 두면 y(무한대)의 값이 아주 작은 값이 된다.
즉, 외부 rock에 의해서 영향받는 position이 에러를 줄일 수 있다.
전달함수는 같으나, disturbance 식은 다르게 나온다.
-> 결론 : 전달함수는 같으나 sensitivity와 disturbance 측면에서는 feedback이 훨씬 효과가 좋다.
예제(English Channel boring machines)
해저 터널 뚫는 장비임
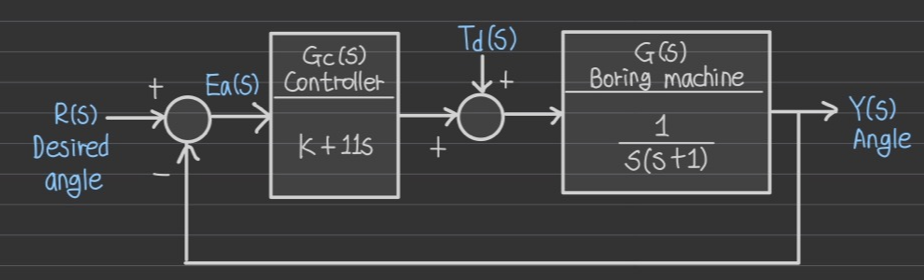
(1) feedback gain K에 대해서 transient response가 어떻게 바뀌는가.
(2) disturbance의 응답은 어떻게 되는가.
-> 와 같은 질문에 대해 생각해보자.
** feedback에서 gain을 잘못 튜닝하면 unstable 상태가 될 수 있다. 주의 !!
** feedback은 위치 제어, 속도 제어에 효과적이다.
'LAB > 제어이론' 카테고리의 다른 글
| 자동제어 : 매트랩 실습 (0) | 2023.04.26 |
|---|---|
| 자동제어(5) linearization, performance of second-order system (1) | 2023.02.03 |
| 자동제어(4) feedback control, error signal analysis, sensitivity (0) | 2023.01.30 |
| 자동제어(3-3) state-space equation (0) | 2023.01.30 |
| 자동제어(3-2) block diagram, Gain formula(Mason's rule) (0) | 2023.01.30 |



