해당 논문 링크 : https://ieeexplore.ieee.org/document/9621830
1. Abstract 및 Introduction
4차 산업혁명의 추진과 함께, 인공지능은 manufacturing 분야에서 주목받고 있다. 특히 CNN과 같은 이미지 처리는 엔지니어가 수행하는 검사 및 테스트 공정에 활용되고 있다. 그러나 CNN과 같은 이미지 인식 학습은 [1] 대량의 이미지를 학습 데이터로 사용, [2] 이미지 획득에 많은 시간과 노력이 소요된다는 단점을 가진다.
본 논문에서는 로봇팔에 장착된 카메라로부터 CNN 학습 영상을 자동으로 획득하기 위한 퍼지 추론 기반 로봇 비전 시스템을 제안한다. 또한, 제안한 시스템은 퍼지 추론을 통해 로봇팔의 서보 모터 진동을 uppress하여 영상 획득 속도를 높이는 방안도 고려한다.
2. Proposed System
(1) Training Data Acquisition System
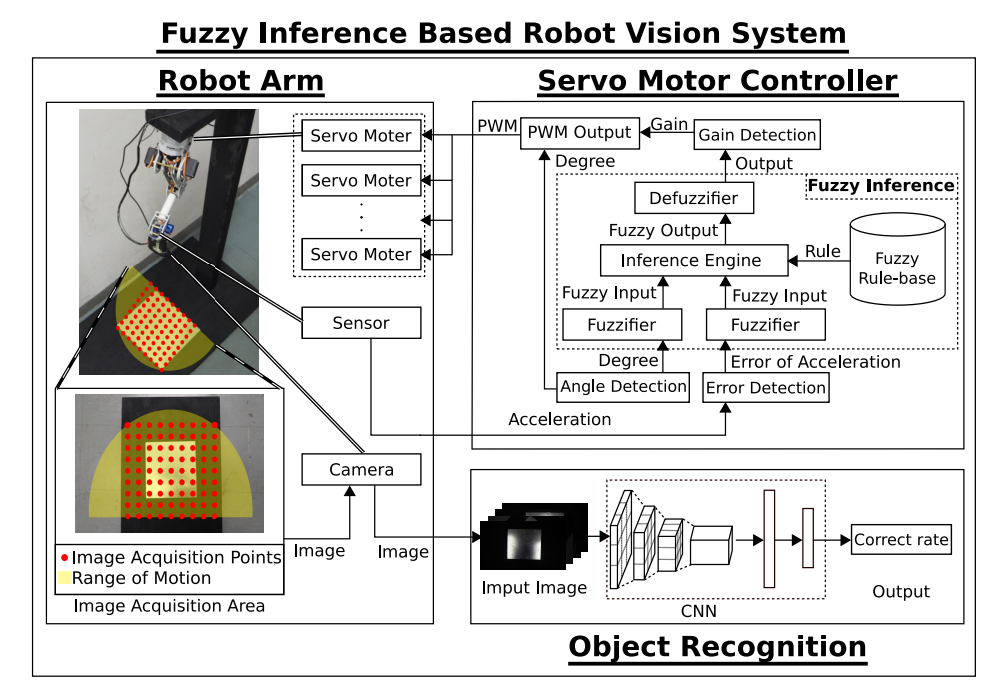
위 그림은 CNN 학습을 위한 영상 획득을 자동화하는 구조다. 제안된 시스템은 6 자유도(6-DoF)의 수직 다관절 로봇을 고려한다. 6-DoF 로봇 팔은 동작 범위 내 81개 지점 중 1개 지점에서 아래쪽을 향하는 카메라를 통해 이미지를 촬영한다. 또한 로봇팔의 각도를 변경하여 동작 범위 내의 모든 위치에서 이미지를 획득함으로써, 훈련 이미지의 수를 늘릴 수 있다. 해당 시스템에서는 로봇팔이 물체를 활영할 수 있는 동작 범위를 수직으로 9등분, 수평으로 9등분하여 총 81개의 영상 획득지점을 설정한다. 이미지 포인트의 간격은 이미지 간의 차이를 인식할 수 있도록 결정된다.
물체가 모든 지점에서 획득 범위 내에 있을 때 촬영한 이미지를 '양수'로 간주한다. 물체가 모든 지점에서 획득 범위 내에 위치하지 않았을 때 이미지는 '음수'로 간주한다. 제안된 시스템에서는 획득한 이미지를 90도 회전하고, 좌우로 뒤집은 후, 8을 곱하여 훈련 데이터를 만든다.
(2) Serno Motors Vibration Suppression Method

위 그림은 로봇팔의 진동을 억제하는 방법이다. 제안하는 방법은 센싱, 퍼지 추론, 서보모터 추론 및 제어를 기반으로 한다. 진동을 감지하기 위해, 아두이노를 사용하여 가속도를 얻는 과정을 거치자. [1] 가속도계 GY-521의 X, Y, Z축 값으로부터 가속도 값을 얻고, [2] 감지된 데이터를 serial transmission을 통해 제어기로 전송한다. 제안한 방법에서는 가속도에 의한 진동 측정이 가능하다. 가속도계를 고려하면 전력과 관련된 물리량, 속도 변화량을 측정할 수 있다.
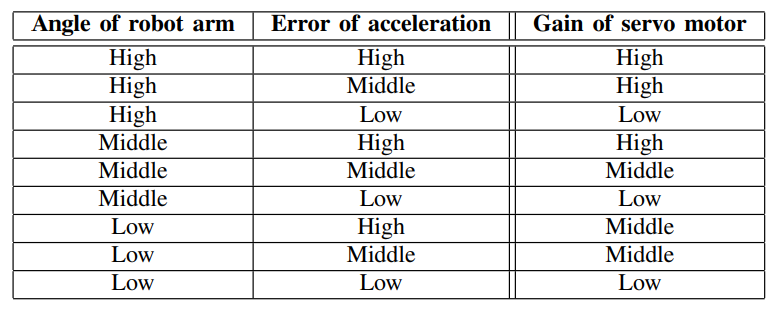
퍼지 추론 부분에는 그림 (a), (b)와 같이 오차와 각도를 입력한다. 오차는 아두이노에서 받은 가속도와 전류로 받은 가속도의 평균값을 X, Y, Z 축별로 제곱하여 더한 값이다. 그림 (c)는 퍼지 추론의 출력이다.
서버 모터 제어는 퍼지 추론의 출력에 따라 (서보 메커니즘의 응답성에 영향을 미치는) Gain을 결정한다. 또한 서버 모터 제어는 획득 위치로 이동하기 위해, 지정된 각도와 함께 Gain을 아두이노로 전송한다. 제안된 시스템은 퍼지추론의 출력이 높으면 이득을 높게 설정, 낮으면 이득을 낮게 설정한다. 로봇팔의 속도는 Gain의 시작 위치에서 시정된 각도까지 서서히 감소한다.
3. Exprimental Results

실험 결과는 위와 같다. 실험에서 서버 모터는 측정 시작 후 약 1.811초 후에 90도로 이동한다. 실험에서 제안된 시스템은 서버 모터의 진동을 억제하여 이미징 속도를 높이고, 안정화할 수 있다. 그림 (a)에서 약 2.535초 당 가속도가 퍼지 추론을 사용한 이득에 의해 감소하는 것을 볼 수 있다. 결과적으로 전체 가속도는 약 34.364% 감소한다.
게다가 우리는 제안된 시스템의 퍼지 추론이 있는 경우와 없는 경우의 iron에 대한 인식 정확도를 비교한다. 실험에서 우리는 iron의 이미지를 촬영한 다음, 10번의 훈련 반복을 거쳐 Keras에 입력하면 정답의 백분율을 출력한다. 그림 (b)는 제안된 시스템의 CNN 학습 결과다. 일반 추론의 정답률은 약 90%인 것에 비해, 퍼지 추론으로 데이터 세트를 학습한 CNN의 정답률은 약 98%이다.
4. Conclusions
본 논문에서는 딥러닝으로 이미지 획득을 위한 로봇 비전 기반 퍼지 추론을 제안했다. 실험 결과, 제안된 시스템은 퍼지 추론을 이용해 서버 모터의 진동을 억제함으로써 영상 획득 속도와 안정성을 높일 수 있었다. 또한 퍼지 추론으로 진동을 억제함으로써 시스템의 CNN 학습 성능이 향상된다. 향후에는 성능 향상을 위해, 영상 획득 지점을 최적화해보자.



