해당 논문 링크 : https://www.mdpi.com/1099-4300/25/7/1050
0. Abstract
이 논문은 혼합 교통 흐름 시나리오에서 다단계 자동차 추종 모델링(multi-step car-following modeling)을 향상시키기 위해 설계된 PICGAN(physics-informed conditional generative adversarial network)라는 새로운 하이브리드 자동차 추종 모델을 제안한다. 이 하이브리드 모델은 물리 기반 모델과 딥러닝 기반 모델의 장점을 모두 활용한다. PICGAN은 GAN의 고유 구조를 활용함으로써 기존 물리학 기반 및 데이터 기반 모델의 조합에 일반적으로 사용되는 명시적인 가중치 측정기가 필요없다. 제안된 모델의 효과는 NGSIM I-80 데이터 세트를 사용한 사례 연구를 통해 입증된다. 이 연구들은 우수한 궤적을 재현할 수 있는 모델의 특성을 보여준다. 궤도 예측 작업에서 기존 모델을 대체할 강력한 경쟁자로서의 가능성을 제시한다.
PICGAN을 구축하면, 혼합 트래픽 흐름 환경에서 안정성과 효율성이 크게 향상된다. 신뢰할 수 있고, 안정적인 결과를 고려할 때 PICGAN 프레임워크는 실제 혼합 교통 상황에서 CAV(connected autonomous vehicle)에 대한 효율적인 종단 제어 전략 개발에 크게 기여한다.
1. Introduction
car-following behivior 모델링은 세계에서 상당한 주목을 받았다. 기술의 발전으로서 머신 러닝, 센서 및 통신 시스템이 CAV(connected and autonomous vehicle)의 개발을 촉진함에 따라 인간의 운전 행동을 이해하고 예측하는 것이 점점 더 중요해지고 있다. 특히 CAV가 인간이 운전하는 차량(HVs, human-driven vehicles)과 공존하는 전환기에는 더욱 그렇다. 이런 맥락에서 자율주행 시스템의 성능을 향상시키고, 교통 안전을 강화하며 효율성을 높이기 위해선 정확한 차량 추종 모델의 개발이 중요하다.
일반 적으로 car-following model은 2가지로 분류된다. [1] 물리학 기반(physics based) 모델은 해석 가능하고 안정적인 예측을 제공하면서 확립된 물리적 법칙 또는 경험적 규칙을 사용하여 차량 추종 행동을 나타내려고 시도한다. 그러나 단순화된 수학적 함수와 제한된 수의 매개변수에 의존하기 때문에, 다양한 주행 시나리오에 대한 일반화가 제한될 수 있다. [2] 데이터 기반(data-driven) 모델은 사전 지식이나 가정 없이 데이터에서 기본 패턴을 추출할 수 있다. 복잡한 주행 행동을 효과적으로 포착할 수 있지만, 때때로 물리적으로 일관되지 않은 예측을 산출할 수도 있다. 따라서 최근 몇 년 간 하이브리드 자동차를 따르는 모델들이 상당히 주목을 받고 있다. 이러한 하이브리드 모델은 물리 기반 접근법과 데이터 기반 접근법의 강점을 모두 결합하여 예측 성능을 향상시킨다.
PIDL(Physics-informed deep learning)은 잠재적인 적용 및 이점을 탐색하는 수많은 연구 분야와 함께 중요한 연구 분야다. PIDL에서 물리적 지식은 지배 방정식, 제약 조건 또는 손실 함수의 정규성 항을 통해 심층 신경망에 통합된다. 즉 PIDL 패러다임은 심층 신경망 내에서 기존 물리 기반 자동차 추종 모델을 활용하여, car-following behavior의 훈련 및 예측을 향상시키는 장점을 보여주는 방법이다.
위의 연구는 물리학 기반 모델, 딥러닝 아키텍처를 결합하는 데 상당한 진전을 이뤘지만 몇 가지 잠재적인 연구 격차를 확인할 수 있다. [1] 하이브리드 모델에서는 명시적인 가중치 매개 변수(explicit weighting parameter)가 종종 사용된다. 이는 모델 간 균형을 맞구처나 손실 함수에서 손실 항에 대한 가중치를 나타내기 위한 목적이다. 이 접근 방식은 하이브리드 모델의 성능을 최적화할 수 있지만, 파라미터 조정 및 과적합 문제가 발생할 수 있다. 이로 인해 계산 비용이 증가하고, 보이지 않는 데이터에 대한 일반화가 제대로 이루어지지 않을 수 있다. 또한 이 접근 방식은 모델 사이의 고유한 역학을 포착할 수 없기 때문에, 새로운 상황에 대한 적응력이 저하될 수 있다. [2] CAV를 위한 하이브리드 자동차 추종 모델을 개발할 때 통합된 물리학 기반 모델은 지능형 운전자 모델(IDM) 및 최적 속도 모델(OVM)과 같이 인간의 운전 행동을 시뮬레이션하는 일반 모델인 경우가 많다. -- 생략
2. Literature Review
생략.
3. Methodology
(1) Physics-Based Car-Following Models
차량 추종 모델은 주행 중인 주행 상태(예를 들어 간격 전진, 속도 차이 및 속도 자체)에서 특정 동작(일반적으로 가속 및 목표 속도)까지의 매핑을 설정하도록 설계되었다. X는 상태 공간(state space) S의 원소이고, Y는 행동 공간(action space) A의 원소, 즉 X ∈ S와 Y ∈ A인 입력-출력 쌍(X, Y)을 생각하자. fλ 로 표시되는 물리학 기반 car-following 모델의 맥락에서, fλ : X -> Y로 표시되는 [state space]에서 [action space]로의 매핑을 학습하는 역할을 한다.
[1] IDM (Intelligent Driver Model)은 2000년에 처음 도입되어 지금까지 계속되고 있다. 이 모델은 사람이 운전하는 차량의 차량 추종 동작을 포착할 수 있으며, 매개 변수는 서로 다른 물리적 해석을 가지고 있다. IDM 지배 방정식은 아래의 두 식으로 표현된다.

a는 실험 차량의 가속도를 나타내고, 상대 속도는 ∆v로 표시된다. 이는 선행 차량의 속도(vp)와 실험 차량의 속도(v) 간 차이이며, ∆v = vp - v로 계산된다. ∆x는 인접한 차량 사이의 간격 거리이며, s*는 원하는 간격 거리 함수다. 주행 거동을 특정 짓는 몇 가지 파라미터로는 최대 가속도(˜a), 원하는 감속 (˜b), 원하는 속도 (˜v), 안전 시간 간격(t0), 최소 안전 간격 거리(s0)가 있다. 이러한 매개 변수를 보정하여 차량추종 역학을 정확하게 포착하자.
[2] CACC(Cooperative Adaptive Cruise Control) 모델을 개발하여 불안정한 ACC 차량 스트링에 비해 CACC 스트링이 안정적인 후속 조치를 가능하게 한다는 것을 입증하였다. 본 연구에서는 통신 기술이 탑재된 CAV를 중심으로 혼합 트래픽 흐름의 안정성을 도모한다. CACC 모델은 실제 차량 궤적에서 파생된 모델이기 때문에 CAV 모델에 사용된다. 아래는 갭 오차와 속도 도함수를 포함한 CACC 모델의 제어 방정식이다.

여기서 e는 실제 갭과 원하는 갭 사이의 갭 오차를 나타낸다. tc는 원하는 일정한 시간 간격을 나타내며, 이전 control time의 실험 차량의 속도는 vp로 표시된다. 제어 파라미터 kp와 kd는 시간 갭 오차를 조정하는 데 사용된다. dt는 업데이트된 시간 간격이며 kp, kd, dt의 값은 실험 테스트를 통해 결정된다. kp = 0.45, kd = 0.24, dt = 0.01, tc의 허용차는 다양하며 tc=0.6일 때 최대 허용률은 57%다.
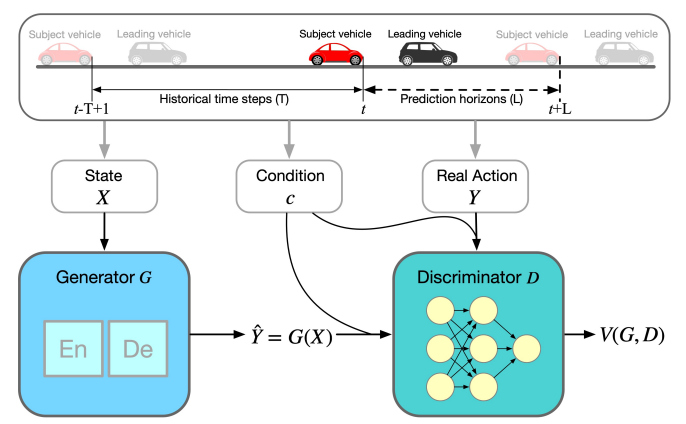
(2) Conditional GAN-Based(CGAN) Car-Following Model
생성 모델은 기본 데이터 분포를 학습하고, 관측 데이터와 유사한 새 샘플을 생성하는 데 초점을 맞춘다. 이 중 GAN(Generative adversarial network)은 최소-최대 게임에서 서로 경쟁하는 2개의 신경망, 발생기(G)와 판별기(D)로 구성된다. 생성기는 실제 데이터 분포와 유사한 합성 데이터 샘플을 생성하고, 판별기는 생성기에서 생성된 가짜 샘플과 실제 데이터 분포를 구별한다. 조건부 GAN(CGAN)은 GAN 프레임워크의 고급 변형을 제시하며, 추가 입력 변수에 의해 식별 과정이 영향을 받는다. 이전 연구들은 자동차 추종 모델의 영역에서 CGAN의 실용적인 유용성을 입증했다.
차량 추종 모델링을 위한 CGAN의 구조는 아래 그림과 같다. 훈련 과정 동안 발생기는 실제 행동, Y^ = G(X)를 생성하는 능력을 지속적으로 향상시키는 반면, 판별기는 추가 정보(c)를 고려하여 실제 행동(Y) 대 가짜 행동(Y^)을 식별하는 능력을 향상시킨다. 이 적대적 과정은 생성기가 실제 데이터와 구별 불가능한 표본을 생성하고 판별기가 둘을 정확히 구별할 수 없는, 즉 평형에 도달할 때까지 계속된다.
아래는 CGAN-based car-following model의 방정식이다.


D*와 G*는 최적 판별기 및 생성기 함수를 나타낸다. V(G,D)는 실제 데이터와 모형에서 생성된 표본 간의 차이를 정량화하는 손실 함수를 나타낸다. 기호 E는 기대값(expectation)을 의미하며, Pdata는 데이터의 진정한 분포를, PG는 생성기 G로부터 얻은 분포를 의미한다. (c, Y)와 (c, Y^)의 두 쌍은 판별기 D에 의해 평가된다.
-> 기대값 : 각 결과값에 대한 확률을 가중치로 사용하여 계산.
(3) Physics-Informed CGAN-Based (PICGAN) Car-Following Model
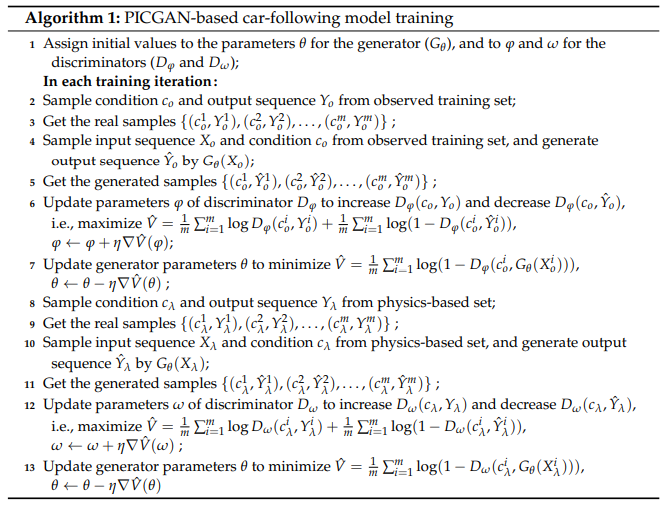
[1] Architecture of PICGAN을 살펴보자. 물리학 기반 모델, 데이터 기반 모델의 장점을 모두 활용하기 위해 PICHAN 아키텍처를 제안한다. 해당 프레임워크는 2개의 판별기와, 발생기를 포함하여 사전 훈련된 물리학 기반 모델을 통합하는 2개의 interlaced CGAN을 구성한다. 왼쪽 CGAN 구조는 관측된 데이터를 사용하여 훈련되는 반면, 오른쪽 CGAN구조는 물리학 기반 모델에서 시뮬레이션된 데이터를 활용한다.
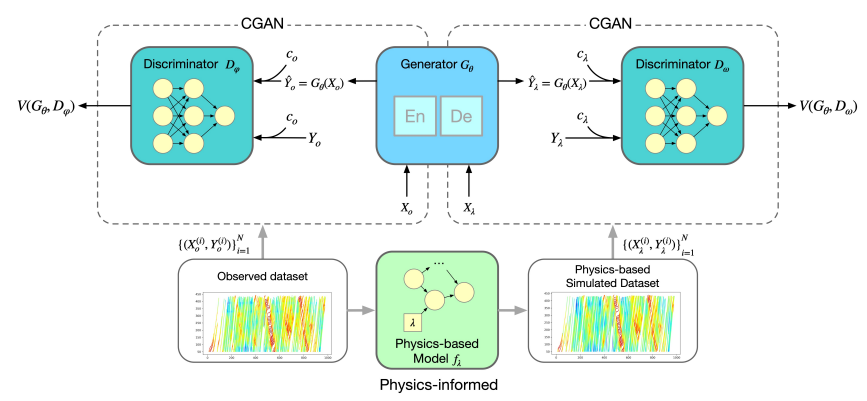
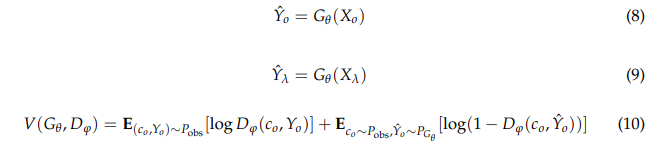
발생기(Gθ)는 식 (8), (9)과 같이 입력 시퀀스 (Xo/Xλ)를 처리하여 출력 시퀀스 (yˆo/yˆλ)를 산출한다. 동시에 데이터 세트(co/cλ)의 조건 시퀀스는 판별자 (Dϕ/Dω)에 대한 추가 정보 역할을 한다. 판별기 Dϕ는 식 (10)의 손실 함수로 나타낸 것과 같이, 출력 시퀀스를 관측된 샘플의 실제 작용과 구별하는 방법을 학습하고 관측된 샘플의 상태의 일관성을 평가한다. 마찬가지로 판별기 Dω는 식 (11)에서 계산된 손실 함수를 사용하여, 물리 기반 샘플에 대해 출력 시퀀스를 평가한다.

발생기와 2개의 판별기에 대한 매개 변수는 trainig 과정에서 업데이트되는 θ, ϕ, ω이다.
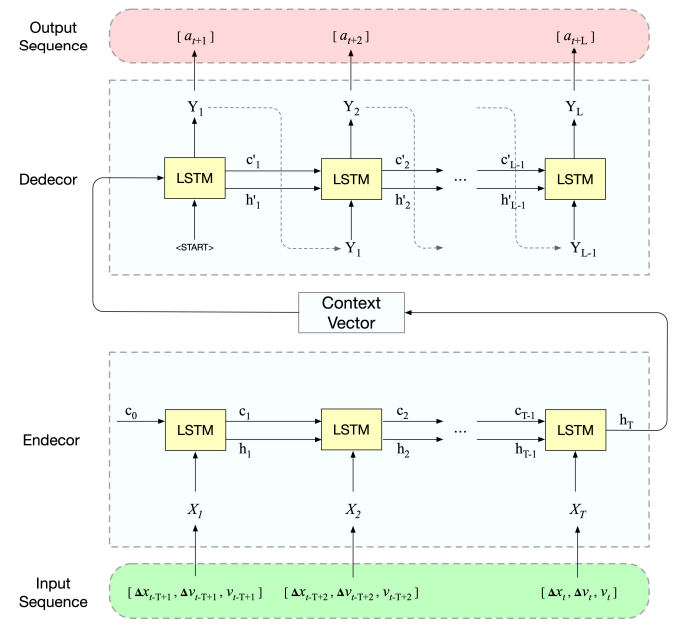
[2] Generator structure within PICGAN, 제안된 아키텍처에서 발생기(Gθ)는 아래 그림과 같이 인코더-디코더 구조를 이용한다. 이 구조는 이전 연구에서 제시된 Seq2Seq 차량 추종 모델과 일치한다. 이 모델은 다단계 주행 상태를 입력으로 받아들이고, 다단계 동작을 출력으로 생성한다. 우리는 거리 및 속도 관련 인자를 입력으로, 지정된 가속도를 출력으로 선택한다. 간격 거리(∆x), 상대 속도(∆v), 속도(v)를 입력 변수로 하고, 가속도(a)를 출력 변수로 한다. 또한 발전기의 입출력은 각각 길이가 T, L인 시퀀스들이다. 아래 식은 매핑 함수다.

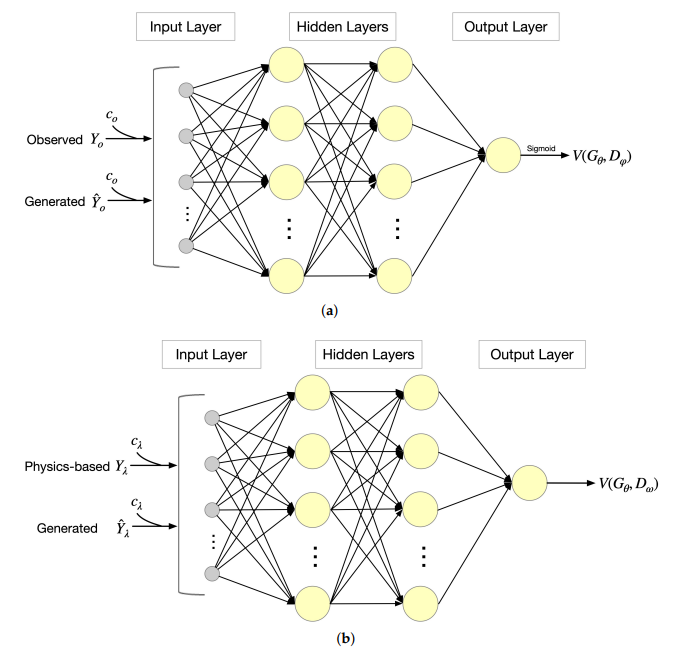
[3] Discriminator structure within PICGAN, 제안된 아키텍처는 2개의 판별기를 포함한다. 판별기 2개 모두 아래 그림과 같이 2개의 은닉 계층으로 구성된 완전 연결 신경망 구조를 사용한다. 출력 레이어에는 시그모이드 함수가 사용된다. 이러한 판별기에 입력되는 입력은 조건과 (미래 time step과 관련된) 실제 또는 생성된 동작, 이 2가지로 구성된다. condition은 이전 시간 단계에서 관찰된 동작 또는 물리학 기반 모델에서 도출된 동작에 의해 결정된다. 각 판별기는 뚜렷한 확률을 나타내는 스칼라 값을 도출한다. Dϕ의 경우 동작이 실제로 생성되었는지 여부를 확인, Dω 은 물리학 기반 모델 또는 생성된 데이터에서 동작이 발생할 가능성을 나타낸다.
4. Results
(1) Data preparation
내용
5. Conclusions
본 연구에서는 혼합 교통 시나리오에서 다단계 차량 추종 모델링의 성능을 향상시키기 위한, 새로운 하이브리드 모델 PICGAN을 제안하였다. GAN의 고유 구조를 활용하여 보다 강력하고 적응적인 솔루션을 제공하며, 이를 통해 모델을 균형잡는 데 필요한 가중 매개 변수(explicit weighting parameter)가 필요 없다.
PICGAN 모델이 궤도 재현에서 우수한 성능을 보여, 인간의 운전 행동을 효과적으로 모방한다는 것을 보여준다. ing



